
搜索结果: 1-15 共查到“机械制造自动化”相关记录4102条 . 查询时间(1.64 秒)
南宁职业技术大学智能制造学院
南宁职业技术大学 智能制造学院 机电一体化 工业机器人
2025/1/16
智能制造学院围绕广西及南宁的汽车、机械、铝深加工、电子信息等多个千亿元产业集群,瞄准产业链、紧贴行业内、对接岗位群,构建先进智能制造专业群,在校学生1900余人。学院坚持“工学一体化,教学做一体化”的现代高等职业教育理念,以雄厚的实力和扎实的教学,成为培养高素质工程技术应用型人才的摇篮,学院学生党支部荣获广西高职院校第一个“首批全国党建工作样板支部”。

2024年12月20日-12月22日,2024-2025全国VEX机器人精英赛暨VEX世锦赛中国选拔赛在上海交通大学闵行校区学生创新中心举办,作为新赛季第一场大型赛事,大学组吸引了来自西安交通大学、上海交通大学、同济大学、华中科技大学、哈尔滨工业大学(深圳)、重庆大学、东南大学、杭州电子科技大学等17所高校的29支队伍参赛。

中国科学院宁波材料所在钢结构环境高空作业机器人研发方面取得进展(图)
结构 环境 机器人
2025/1/16
由于钢结构建筑、风电塔、化工储罐等高空作业场景对安全性和作业效率的要求逐年升高,传统人工作业模式已无法满足钢结构作业要求,同时还大大限制了高空作业的高效性和精准性。随着工业自动化和智能化的不断发展,高空作业机器人通过AI驱动和多传感器融合技术,为钢结构的高空作业提供了更为可靠和高效的解决方案。

广东科技学院机电工程学院王春宝正高级工程师(图)
广东科技学院机电工程学院 王春宝 正高级工程师 机械工程 机械制造及其自动化 机器人技术
2025/2/13
王春宝,男,中共党员,正高级工程师,2014年获早稻田大学仿生机器人专业博士学位,中山大学博士后博士后,硕导,博士后创新基地导师。现任医工结合教实验室教授、骨干教师。早稻田大学理工学术院研究员,香港城市大学高级访问学者。现任深圳市康复医学会人工智能康复专业委员会,副主任委员;中华县域康复联盟,康复机器人首席专家;大湾区康复医学会,副秘书长;深圳市康复医学会,理事;北京理工大学、华南理工大学、东莞理...

广东科技学院机电工程学院马雪峰教授(图)
广东科技学院机电工程学院 马雪峰 教授 机械设计 数控技术
2025/2/13
马雪峰,女,中共党员,教授(二级),哈尔滨工程大学机械设计及理论专业工学硕士学位,国家精品课程和精品资源共享课程负责人,数控加工中心高级技师。1990年至2024年先后就职于齐齐哈尔第一机床厂、齐齐哈尔职业学院、常州机电职业技术学院,目前为广东科技学院机电工程学院机电教研室专业教师。主讲《数控技术》、《数控机床与操作》、《数控编程与加工》、《SolidWorks软件应用》等课程,主要研究研究领域为...

2024年12月4日,我院机械电子工程系陈新元、钱新博代表学校参加了在杭州举行的全国液压气动标准化技术委员会(SAC/TC3)九届二次会议及分会会议。这次会议汇聚了来自全国的行业专家、学者和企业代表共260余人,共同探讨液压气动相关国家/行业标准和技术发展的最新趋势及未来工作安排,是我国液压气动标准化建设征程上的重要会议。

近日,哈尔滨工业大学机电工程学院谢晖教授团队研发出一种可精准控制打印结构磁化分布的光固化3D打印技术。相关研究成果以《磁矩空间可编程光固化打印技术制备仿生薄壁软体机器》(Programmable spatial magnetization stereolithographic printing of biomimetic soft machines with thin-walled structu...

博士,讲师,硕士生导师。2020年获得东北大学控制理论与控制工程博士学位,同年就职于安徽大学电气工程与自动化学院。IEEE Member,中国自动化学会(CAA)会员。
江苏省物联网智能机器人工程实验室是2017年经江苏省发展和改革委员会批准筹建,主要以我国信息产业的需求为导向,依托南京邮电大学的优势学科和重点实验平台,对有市场价值的重要应用科技成果进行研究和开发,并对共性、关键技术进行工程化、产业化以及系统集成的高新技术研发实体。
徐国政,男,博士,教授。2010年6月毕业于东南大学仪器科学与技术专业(机器人传感与控制研究方向),获工学博士学位;曾在某大型通讯企业从事数字电路研发工作2年;2010年6月至今在南京邮电大学自动化学院、人工智能学院工作,2013年任副教授,2017-2018年担任加拿大阿尔伯塔大学计算机系“计算视觉与机器人控制实验室”访问教授,2019年任教授;入选江苏省“青蓝工程”与“双创计划”;兼任中国仪器...
范保杰,男,教授,博导,毕业于中国科学院沈阳自动化研究所机器人学国家重点实验室,获模式识别与智能系统博士学位。先后主持或参与多项国家重点研发计划(智能机器人专项),国家自然基金重点项目、面上、青年,国家973,863计划,国家反恐专项,总装备部预研(921)等项目的研究。
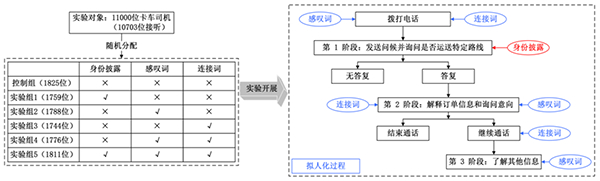
国家自然科学基金委员会中国学者与海外合作者在人机交互研究领域取得进展(图)
数据 人工智能 机器人
2024/11/22
在国家自然科学基金项目(批准号:72172169、91646325)等资助下,中央财经大学代宏砚教授与海外合作者在人机交互领域取得了进展。研究成果以《考虑身份披露与拟人化的语音聊天机器人交互设计:一项田野实验》(Identity Disclosure and Anthropomorphism in Voice Chatbot Design: A Field Experiment)为题,于2024年...

基础设施检测智能微型仿生机器人(图)
智能微型 仿生机器人
2024/10/29
核心技术:掌握微型仿生机器人机构设计与自主定位技术,可用于电力巡检和地下管道巡检,拥有结构、电路、控制算法全套核心技术。成果体现形式:新装备。技术成熟度:实际环境应用验证。成果领先性:核心指标达到国际技术同等水平。

作业型飞行机器人(图)
作业型 飞行机器人
2024/10/29
技术特点:飞行机器人携带机械臂可以实现高空全自主接触式作业,打破传统飞行机器人单一的远距离监测的局限,实现与环境的交互操作。核心专利:飞行机器人抗风扰控制、飞行机械臂、接触式作业飞行机器人等。成果体现形式:新装备。技术成熟度:形成原型并验证。成果领先性:核心指标优于国内类似技术。

腔道手术机器人(图)
腔道 手术机器人
2024/10/29
核心技术:运动解耦和偏置骨架的柔性机构创成、建模以及感知技术,实现柔性机器人精确、稳定控制。重点解决问题:人体腔道手术环境复杂动态多变,人手工操作具有难度和局限性。技术主要特点:多种构型的灵活柔性体及基于布拉格光栅的多元感知技术。核心专利:机器人整体构型,柔性体构型、控制以及多元感知。成果体现形式:新装备。技术成熟度:实际环境应用验证。成果领先性:核心指标优于国内类似技术。